
ES@S is helping to deploy innovative mapping tools to help to protect seagrass in Dorset
ES@S was pleased to deploy the PicoCat Autonomous Surface Vehicle (ASV) with MultiBeam Echo Sounder (MBES) to help map seagrass distribution in Studland Bay as part of a project led by Dr Hachem Kassem from the School of Ocean and Earth Science.
The project, funded as a Southampton Geospatial and Southampton Marine and Maritime Institute pilot project, seeks to survey and assess the health of seagrass beds in Studland Bay, Dorset.
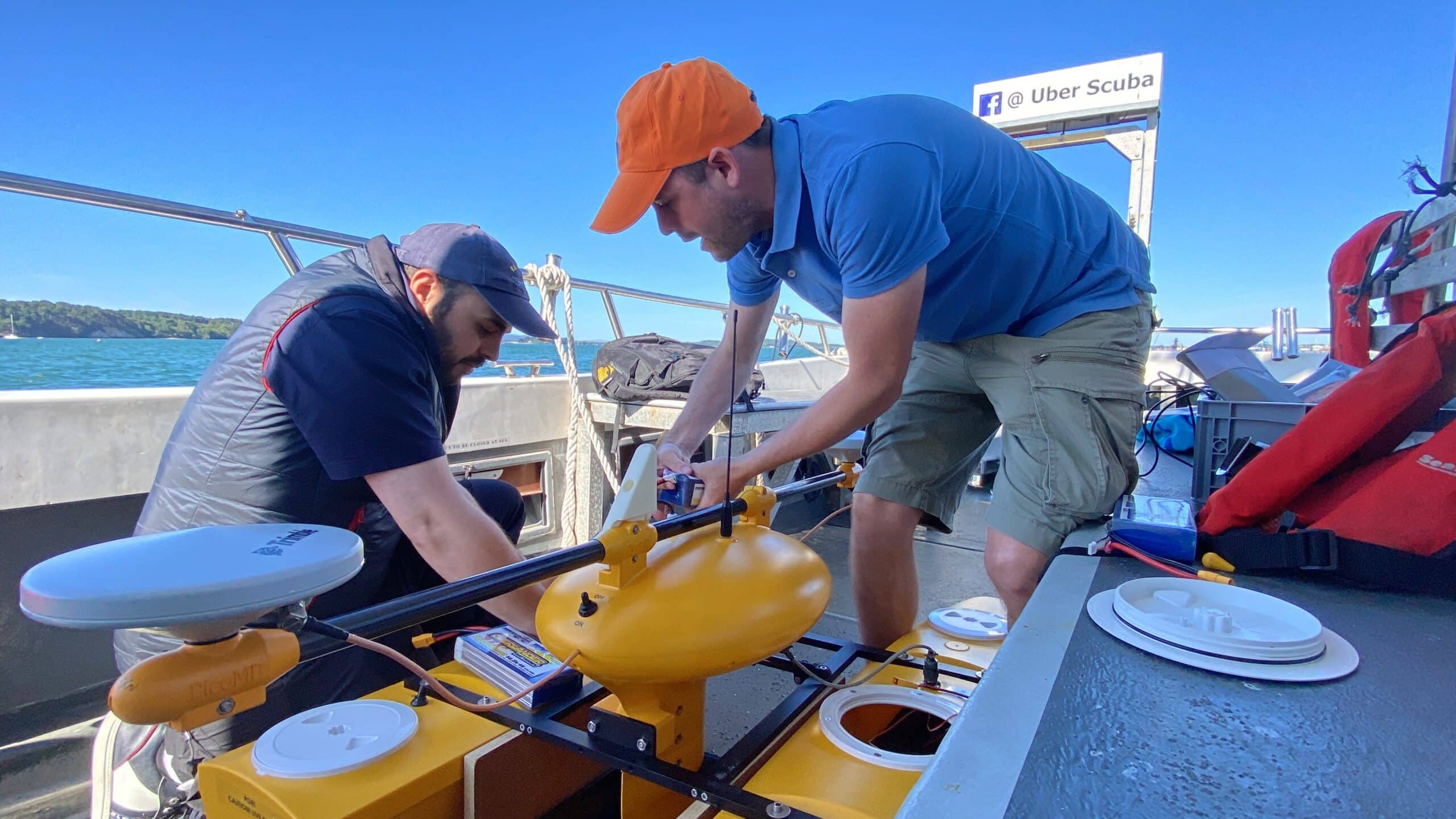
The PicoCat ASV was deployed along preset survey lines to map a patch of seagrass that has been recovering from previous anchor damage. In an effort to reduce this damage and allow recovery, ‘eco-moorings’ have been installed.
These are designed to reduce boat anchor damage and so allow the seagrasses and local biodiversity to thrive whilst maintaining the vibrant sailing and recreational activities within the bay.
“Our work will support the local community and organisations that manage the area, to implement an appropriate conservation strategy to protect and promote the health of these seagrass meadows”
Dr Hachem Kassem, School of Ocean and Earth Sciences
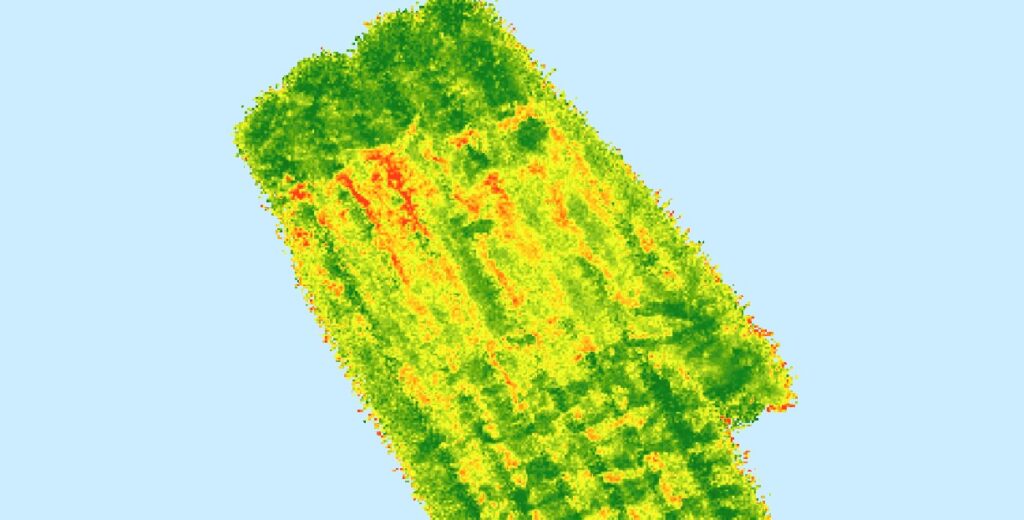
The collected MBES data can be analysed in a number of ways to try and detect seagrass occurence, for example analysis of first and last beam returns and creation of roughness maps.
The map below shows the results of applying a moving window standard deviation of elevation filter to the MBES pings. Here, hotter colours correspond to high deviations in the ping data, indicative of the presence of seagrass.
The deployment of PicoCat was supplemented with underwater vehicles from the Ocean Perception team, led by Prof. Blair Thornton and ground truthed using dives led by Dr Ken Collins.